






Zaczęło się od Leonarda
Jak długo są z nami pojazdy, zdolne do przemieszczania się bez kierowcy? W artykule „Smartfony to za mało? Pora na inteligentne samochody” wspomniałem o kilku konstrukcjach z lat 80. I 90., które – mimo braku GPS-u – były w stanie samodzielnie jeździć po publicznych drogach i radziły sobie z tym zadaniem całkiem nieźle.
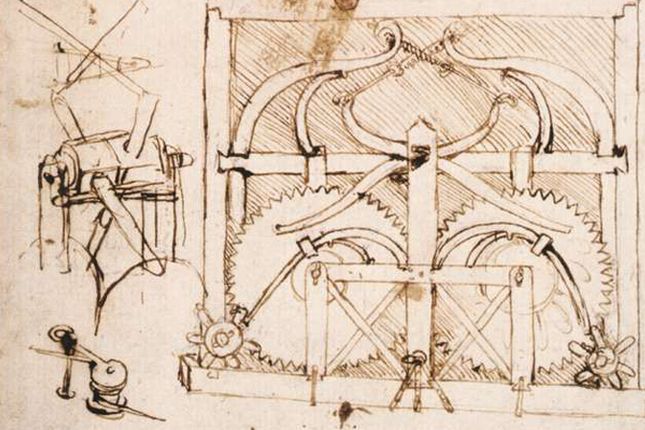
Początki pojazdów, jeżdżących bez kierowcy są jednak znacznie wcześniejsze. O samej idei pisał nawet Leonardo da Vinci, ale – przy całym szacunku do dorobku renesansowego geniusza – genialne pomysły nie popychają świata do przodu. Robią to ci, którzy poza wymyślaniem, potrafią je zrealizować.
Samochód widmo w Milwaukee
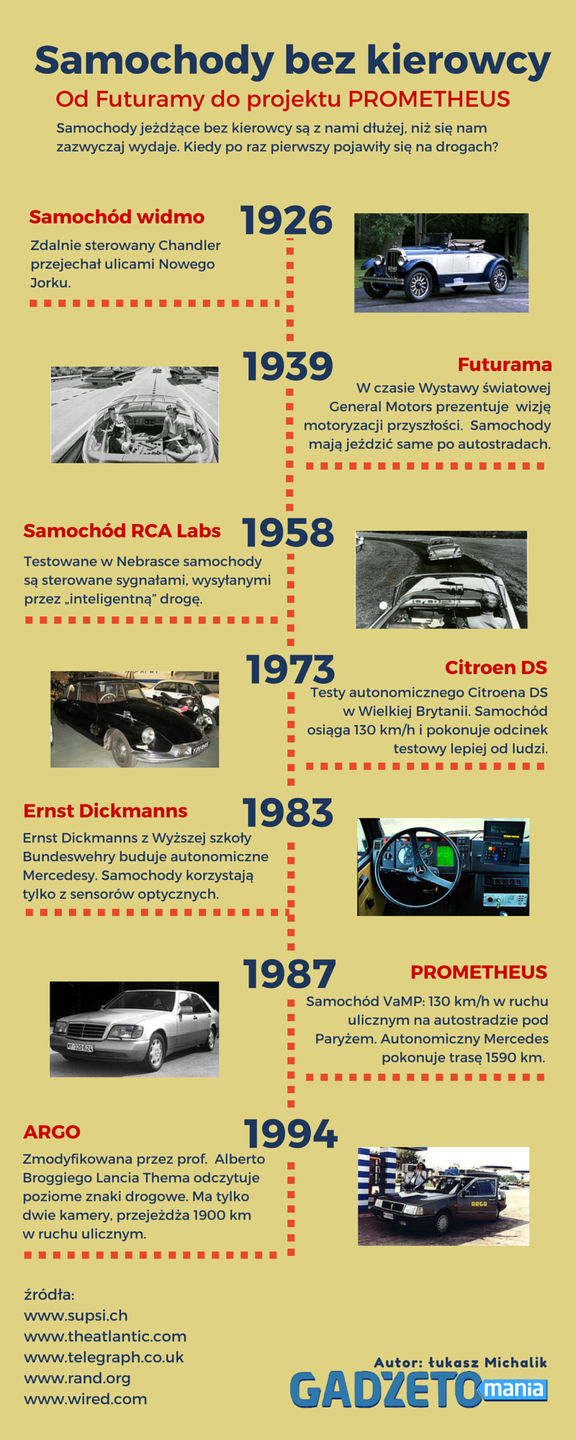
Pierwsze samochody bez kierowcy pojawiły się jeszcze w latach 20. w Stanach Zjednoczonych. Nie były to jednak pojazdy autonomiczne, ale zwykłe samochody, w których kierowcę zastąpiono układem zdalnego sterowania, kontrolowanym z samochodu jadącego z tyłu.
Uzyskany efekt musiał być jednak spektakularny, jeśli np. gazeta The Milwaukee Sentinel z 1926 roku informowała o planowanej próbie takiego wehikułu, pisząc o krążącym po ulicach samochodzie widmo.
Futurama, czyli miasta dla samochodów!
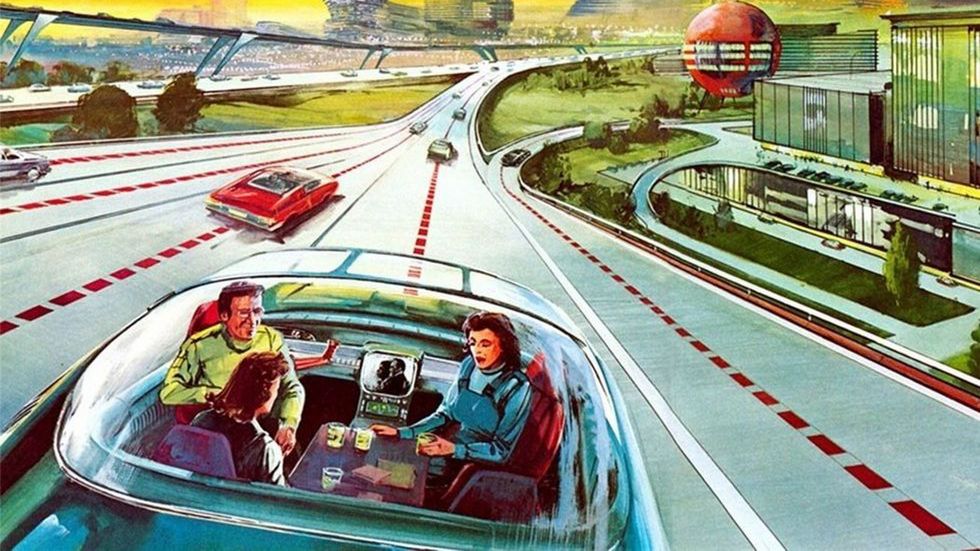
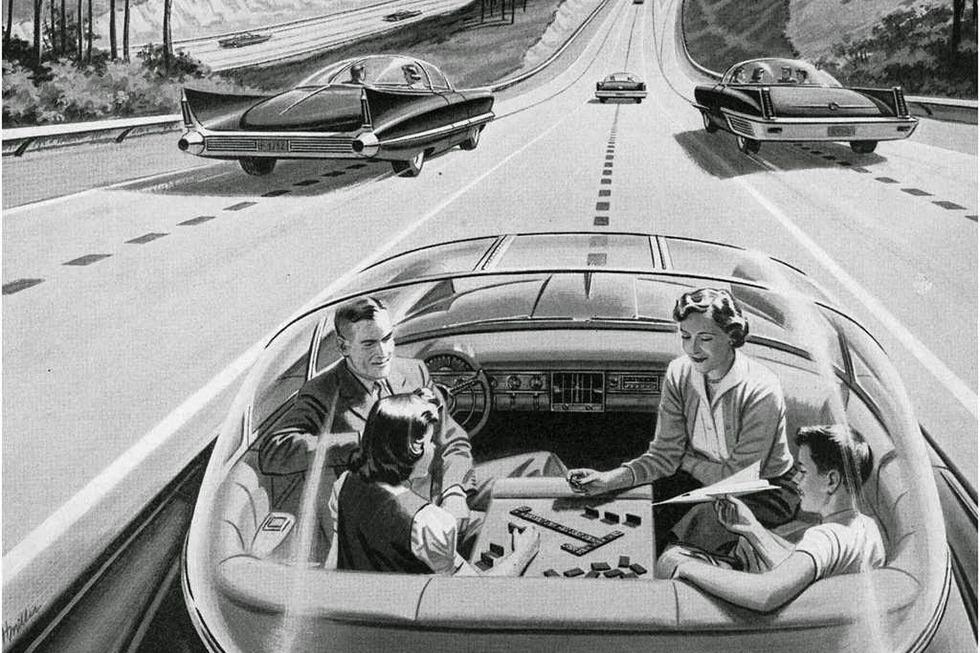
O prawdziwie autonomicznych pojazdach możemy mówić od 1939 roku, a konkretnie od zorganizowanej w Nowym Jorku Wystawy Światowej. Z okazji wystawy firma General Motors Corporation przygotowała[block position="indent"]5289[/block] ekspozycję Futurama (tak, to właśnie od niej pochodzi tytuł znanego serialu), pokazującą, jak – zdaniem General Motors – zmieni się świat do 1960 roku.
Koncepcja, przedstawiona w Futuramie miała okazać się jedną z najbardziej chybionych i przyczyną późniejszych problemów amerykańskich miast z Detroit na czele.
Chodziło w niej m.in. obseparację – również w miastach – ruchu samochodowego od otoczenia. Jeden z autorów Futuramy, Norman Bel Geddes, pisał w wydanej rok później książce „Magic Motorways”:
Kierowca przejeżdżający przez miasto nie ma więcej powodów, żeby się w tym mieście zatrzymać, niż samolot przelatujący nad tym miastem.
Praktyka była taka, że drogi szybkiego ruchu skutecznie rozerwały miasta na części, uniemożliwiając pieszym przemieszczanie się pomiędzy nimi i prowadząc do późniejszych problemów z wyludnianiem się centrów miast, rozrastaniem się przedmieść i podupadaniem całych dzielnic.
WIDEOFuturama at the 1939 World's Fair, shot by H. Earl Hoover
Mimo tego pod względem technologii Futurama przedstawiała optymistyczną wizję bezkolizyjnego ruchu i pozbawionych kierowców samochodów, poruszających się po specjalnie dostosowanych do tego celu autostradach.
Samochody sterowane drogą
W późniejszych latach wielokrotnie wracano do tej koncepcji i ją ulepszano. Już w 1953 firma RCA Labs przeprowadziła próby z miniaturowym modelem, poruszającym się samodzielnie dzięki umieszczonym w drodze, magnetycznym paskom.
W 1958 roku RCA Labs przeprowadziła próbę z pełnowymiarowym samochodem na specjalnie przygotowanym odcinku publicznej drogi w Nebrasce, a dzięki współpracy z General Motors udało się stworzyć jeszcze bardziej zaawansowane rozwiązanie – drogę, wykrywającą znajdujące się na niej metalowe obiekty (czyli samochody).
Na podstawie tych informacji autonomiczny samochód był w stanie przyspieszać, hamować i skręcać, poruszając się w ruchu ulicznym, a rozwiązanie było na tyle dopracowane, że na testowe przejazdy zapraszano nawet dziennikarzy. Planowano wówczas, że komercyjnie dostępne, autonomiczne samochody pojawią się w sprzedaży w 1975 roku.
W latach 60. I 70. podobne próby prowadzono również w Wielkiej Brytanii, z wykorzystaniem – o ironio! – francuskiego Citroena DS. Samochód był sterowany dzięki umieszczonym w drodze kablom sygnałowym, a w czasie prób uzyskano średnią prędkość przejazdu sięgającą 130 km/h i precyzję prowadzenia, nieosiągalną dla ludzi. Celem tych prób było zwiększenie przepustowości angielskich dróg. Oceniano, że autonomiczne pojazdy zwiększą pojemność dróg o połowę.

Wszystkie te pomysły – choć jak na swoje lata nowatorskie – miały jednak jedną, podstawową wadę: ingerowały w infrastrukturę. Samochód był „autonomiczny” do czasu, gdy nie skończyła się specjalnie przygotowana dla niego droga, w którą trzeba było wmontować różnego rodzaju kable sygnałowe czy magnetyczne paski.
Bez tych dodatków pojazd był niezdolny do samodzielnej jazdy, a ten kierunek rozwoju okazał się ślepym zaułkiem - wymagał zbudowania dróg od nowa.
Ernst Dickmanns i ruchy sakadowe
Na szczęście postępujący rozwój technologii dał konstruktorom nowe możliwości. [block position="indent"]5290[/block]Już na początku lat 80. Ernst Dickmanns z Wyższej Szkoły Bundeswehry w Monachium (w 1985 roku zmieniono nazwę na Uniwersytet Bundeswehry) zaczął prowadzić próby z całkowicie autonomicznym pojazdem, bazującym na 5-tonowym vanie Mercedesa. Rozmiary testowego samochodu nie były przypadkowe - ówczesna elektronika wymagała pojazdu o sporej ładowności.
Dickmanns jest ekspertem od komputerowego przetwarzania obrazów i właśnie tę technologię postanowił wykorzystać w swoim pojeździe. Samochód został wyposażony w kilka kamer i komputer, przetwarzający uzyskany z nich obraz, a konstruktor opracował nowatorski algorytm, symulujący tzw. ruchy sakkadowe ludzkiego oka i pozwalające komputerowi na „widzenie” trójwymiarowe.

Dzięki temu – mimo bazowania wyłącznie na sensorach optycznych – samochód Dickmannsa mógł poruszać się po nieprzygotowanej, nieznanej drodze. Ze względu na obowiązujące w Bawarii przepisy wykorzystano w tym celu wyłączone z użytku fragmenty dróg, gdzie pojazd o nazwie VaMoRs był w stanie samodzielnie jeździć z prędkością dochodzącą do 96 km/h.
Europejski program PROMETHEUS
Sukcesy niemieckiego konstruktora zostały wykorzystane niedługo później w czasie prac nad europejskim autonomicznym samochodem, prowadzonych w ramach programu PROMETHEUS (PROgraMme for a European Traffic of Highest Efficiency and Unprecedented Safety). Wspierany przez Komisję Europejską i liczne koncerny motoryzacyjne projekt okazał się wyprzedzać swoje czasy.

Efektem programu był m.in. pojazd VaMP, czyli przerobiony Mercedes 500 SEL, który poza wykonywaniem podstawowych manewrów był w stanie m.in. samodzielnie śledzić innych uczestników ruchu, zmieniać pasy i wyprzedzać wolniejsze samochody. Co więcej, sterujący nim komputer potrafił kontrolować jednocześnie kilka samochodów!
W 1992 roku udało się, bazując przede wszystkim na przetwarzaniu obrazu – przeprowadzić próby autonomicznych samochodów w normalnym ruchu ulicznym, a już w 1995 roku autonomiczny samochód przejechał trasę z niemieckiego Monachium do miasta Odense w Danii, pokonując samodzielnie około 1700 kilometrów.

Warto jednak pamiętać, że co pewien czas była wymagana interwencja człowieka, a najdłuższy odcinek przejechany bez ingerencji kierowcy wynosił 158 kilometrów. Na niemieckiej autostradzie prowadzony przez komputer Mercedes rozpędził się aż do 175 kilometrów na godzinę.
Lancia śledzi pasy na drodze
Równolegle do programu PROMETHEUS we Włoszech prowadzono kolejny, o nazwie ARGO. Przebudowana Lancia Thema, będąca dziełem Alberto Broggiego z Uniwersytetu w Parmie wykorzystywała nieco inne rozwiązania, niż pojazdy Dickmannsa i bazowała na śledzeniu poziomych znaków, namalowanych na drogach. Rozwiązanie to również okazało się całkiem skuteczne – w czasie prób pojazd ARGO był w stanie samodzielnie jeździć przez 94 proc. czasu na dystansie, sięgającym 1900 kilometrów.
WIDEOProgetto ARGO
W latach 90. własne prace nad autonomicznymi pojazdami prowadziła również DARPA i – we współpracy z nią, Carnegie Mellon University. Stworzony dzięki tej kooperacji pojazd o nazwie Autonomous Land Vehicle (ALV) był w stanie nie tylko samodzielnie poruszać się po drogach, ale także przemieszczać się w trudnym, nieznanym terenie z licznymi przeszkodami, osiągając wówczas prędkość do 3 kmh.
Niedługo później Amerykanie zdecydowali o udostępnieniu niezakłóconego sygnału GPS całemu światu, a łatwy, tani i powszechny dostęp do precyzyjnej nawigacji satelitarnej otworzył zupełnie nowy - i trwający do dnia dzisiejszego - rozdział w historii autonomicznych samochodów. Ale to już zupełnie inna historia.
W artykule wykorzystałem informacje z serwisów Telegraph, Miasta i ludzie, Wired, Google News i The Atlantic.

Pisze odkąd pamięta. Oddycha sygnałem Wi-Fi, czci dziwne mieszanki herbat, a do krwiobiegu ma na stałe podłączony modem i kroplówkę z espresso. Wieczny malkontent, wielbiciel starych wynalazków i czasów, gdy światem rządziło Wspaniałe Pokolenie. Niezmiennie uważa, że światem nowych technologii ciągle wstrząsa seria informacji bez znaczenia, gdy te naprawdę istotne pozostają niemal niezauważone.












